Warning:
This wiki has been archived and is now read-only.
F2F1ConceptDefinitions
Contents
Concept Definitions Agreed at the F2F1
A discussion document was produced as input for the first F2F meeting; this input document is frozen.
On this page, we record revised definitions and outstanding issues agreed at F2F1. They will be used as input for the first Public Working Draft of the Conceptual Model.
BOB (Placeholder for ex:Thing)
BOBs represent real-world entities and have properties modeling aspects of entity states.
BOBs have: * an identity * a set of invariant (== immutable) properties * a set of mutable properties There are no assumptions that the sets of properties are complete, or that the properties are independent/orthogonal of each other.
A BOB is an information artifact about a state of an entity in the world. A BOB is an invariant assertion, made at a particular point. A BOB could be made by guessing, lying, observing, ... A BOB is an assertion about an entity that is variant in the world. A BOB consists of invariant characteristics. A BOB has an identity that identifies the state of the entity.
---
Process Execution
A process execution is an activity that uses (zero or more) entity states, described by BOBs, performs a piece of work, and generates (zero or more) new entity states, described by BOBS.
A process execution is an activity that performs a piece of work.
Generation
Generation is the action/transition/event by which a process execution creates a new entity state.
Generation is the creation of a new entity state by a process execution.
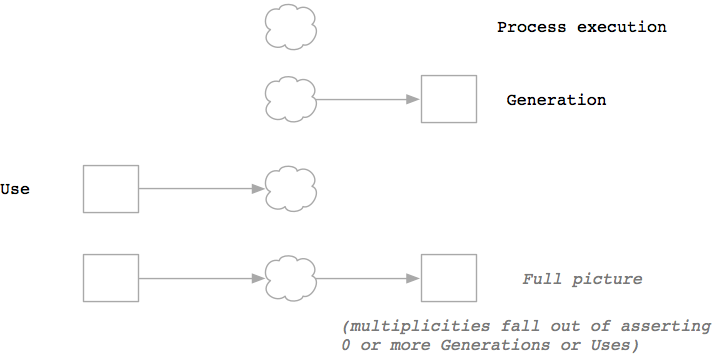
Use
Use is the consumption of an entity state by a process execution.
Derivation
Derivation expresses that some entity is transformed from, created from, or affected by an other entity. An entity state B is derived from an entity state A if the values of some properties of B are at least partially determined by the values of some properties of A.
Agent
An agent is an entity capable of activity. It can be asserted to be an agent or can be inferred to be an agent by involvement in a process execution. An agent is described by an agent state
An agent is a BOB capable of activity. It can be asserted to be an agent or can be inferred to be an agent by involvement in a process execution.
An agent is an entity capable of activity. It is represented as a BOB. It can be asserted to be an agent or can be inferred to be an agent by involvement in a process execution.
An agent is a SOMETHING (TBD) capable of activity. It can be asserted to be an agent or can be inferred to be an agent by involvement in a process execution.
IVP of
Let A and B be two entity states. An assertion "B is an IVP of A" indicates that, for its asserter, A and B represent the same entity in the world, and the entity states modelled by A and B are consistent. "B is an IVP of A" is valid ony if, for its asserter, the following holds:
- the properties they share must have corresponding values
- some mutable properties of A correspond to some immutable properties of B
B has invariant properties that have no correspondent for A
Thing
Car Speed example
[] a pil:Entity;
pil:hasDescription [
a pil:NOT_STATE_Description;
dct:description "The speed of car_0 is 30 miles/hour.";
];
pil:hasDescription [
a pil:ChangeDescription;
dct:hasPart [
dct:description "car c_0 at position x_1 at time t_1";
];
dct:hasPart [
dct:description "car c_0 at position x_2 at time t_2";
];
dct:hasPart [
dct:description "derivative calculation";
];
];
pil:hasDescription [
a pil:StateDescription;
dct:description "the car speedometer reads '30'";
];
pil:hasDescription [
a pil:StateDescription;
dct:description "the gps reads '30'";
];
pil:hasDescription [
a pil:StateDescription;
dct:description "the cop's radar reads '30'";
];
pil:hasDescription [
a pil:StateDescription;
dct:description "the driver of car_0 said he was driving at '30'";
];
.