Warning:
This wiki has been archived and is now read-only.
SSN Wind Sensor
Contents
Wind sensor (WM30)
Available resources
- OWL file: WM30
- Paper: [Compton et al. 2009b]
Reasoning about Sensors and Composition (using CSIRO ontology)
The Vaisala WM30 wind sensor measures wind speed and direction. The WM30 has two options for wind direction: the WMS301 and the WMS302, which have different measurement ranges. The accuracy of its wind speed measurements is condition dependent: accuracy of +-3m/s at low wind speed and +-2% at higher wind speeds.
Thus, as an example, it shows how to describe a device with multiple sensing capabilities, how to describe the multiple subtypes of the same device and how to describe accuracy (or other properties) relative to prevailing conditions. Further, it shows the detail that can be expressed through the accuracy, as both relative and absolute error, and through different properties for the two wind speed options.
Wind Sensor system
The WM30 is a device (a piece of hardware and embedded software 260x300mm); however, for the purposes of the example, the two parts of the WM30 are left underspecified. The specification isn't concerned if the wind speed and direction sensors are devices or not. If they were separable from the WM30 and usable separately they should each be modelled as devices. As it stands, the WM30 is a single device with two sensing capabilities that aren't separable from the device; hence they are just modelled as sensors that implement sensing (the use of hasSubSystem means they must be Systems, which is fair enough as they are pieces of technology).
Figure 5.33 - Wind Sensor example: System
Specification of the method used in the Wind Sensor
The wind speed sensor uses a known formula to convert the speed of the cups to an observation of wind speed. Here we detail the formula and specify that all WM30 devices implement this sensing method.
Figure 5.34 - Wind Sensor example: Sensing method
Operating Range
WM30 devices are rated to operate between -40 and +55 degrees C. Here we model this environmental operating condition along with a power input requirement as the device's operating range.
Figure 5.35 - Wind Sensor example: Operating range
The WM30 example also shows how to enter more than one Measurement Capability value for a given property: with wind speed 0.4--10m/s the WM30's accuracy is +-3m/s, while from 10m/s to 60m/s it's +-2%. See the WM30_WindSpeed concept in the example which has the two measurement capabilities ("WSless10ms" and "WSgt10ms") and the conditions under which they apply.
Survival Range
Similarly, the device should not be subjected to temperature extremes outside -60 to +65 degrees C. This is modelled as a survival range to state that if exposed to such conditions the device no longer operates as specified.
Figure 5.36 - Wind Sensor example: Survival range
Wind Feature and properties
This example also includes a definition for Wind as a Feature of Interest with two properties: wind direction and wind speed.
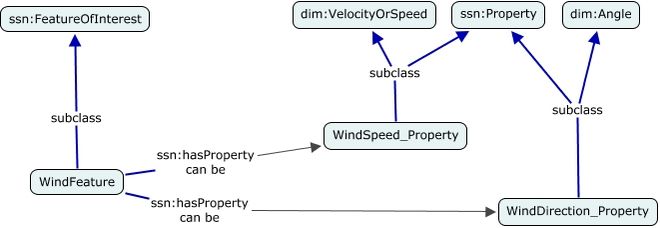
Figure 5.37 - Wind Sensor example: Feature of interest